
Physical Intelligence has unveiled π₀ (pi-zero), a novel foundation model designed to serve as a universal "brain" for robots. The company is one of just a handful of startups working on general-purpose robotic control by combining large-scale vision-language pre-training with diverse robot interaction data.
The company's flagship model, π₀, takes a fundamentally different approach to robot control compared to traditional methods. Rather than creating specialized software for specific robots and tasks, π₀ aims to provide a single, generalist AI system capable of controlling any robot to perform any task.
"What we're doing is not just a brain for any particular robot," explains Karol Hausman, Physical Intelligence's CEO and co-founder. "It's a single generalist brain that can control any robot."
At its core, π₀ builds on Google's PaliGemma, a 3-billion-parameter vision-language model (VLM), which provides the foundation for understanding visual and language inputs. The model is augmented with an additional 300 million parameters dedicated to robot control, bringing the total to 3.3 billion parameters.
The system employs a novel "flow matching" architecture that enables high-frequency robot control—up to 50 times per second—making it suitable for complex dexterous tasks. This capability sets π₀ apart from previous approaches that struggled with precise, real-time control.
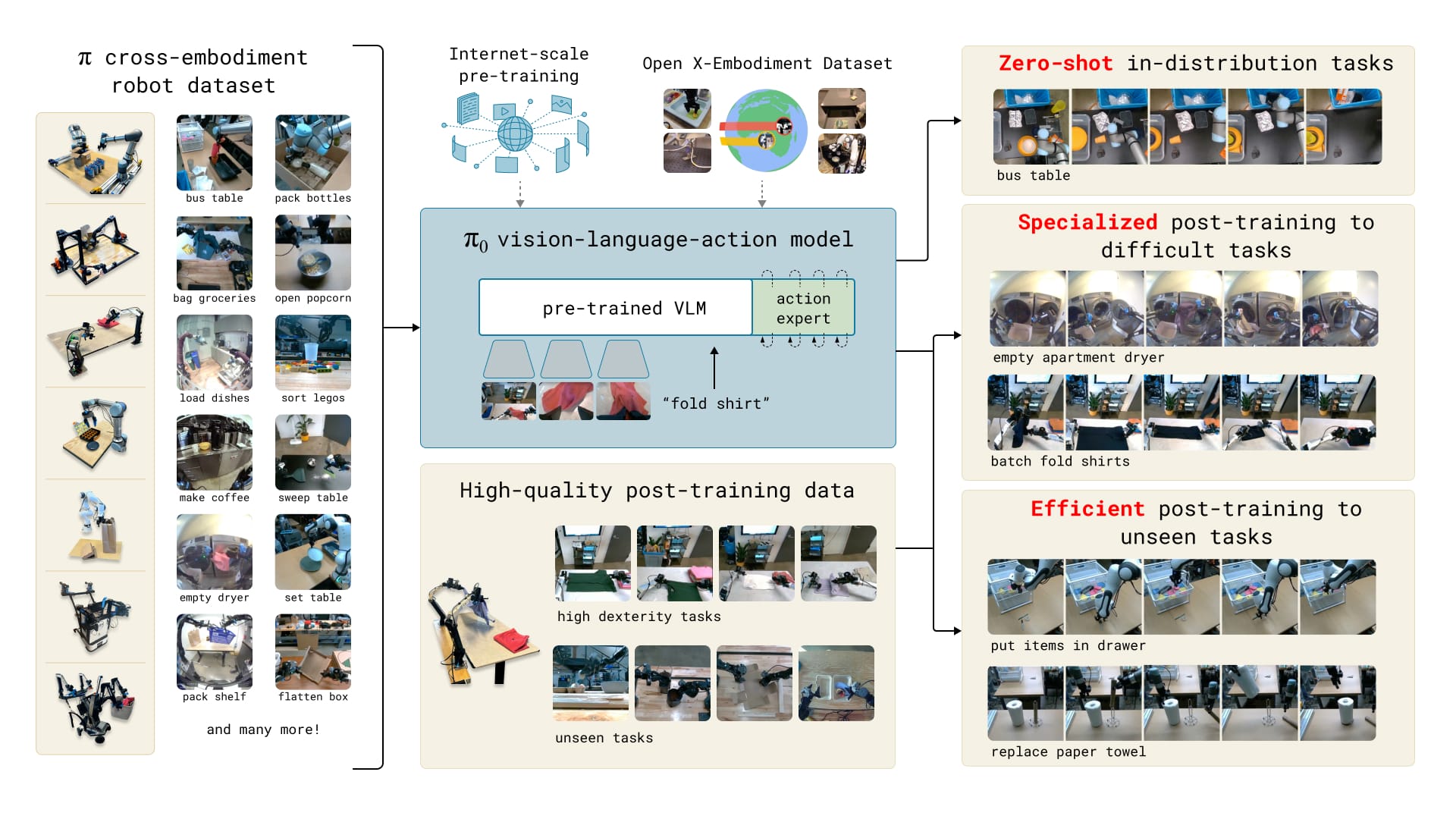
One of the most striking demonstrations of π0’s capabilities is its ability to fold laundry. This is far from a trivial task: items can be crumpled in countless different configurations, and folding them neatly requires nuanced judgment and adaptability. Physical Intelligence fine-tuned π0 on specialized data to tackle this particular task. The model showed the ability to autonomously pick up laundry from a dryer, place it on a folding table, and fold each item neatly. Notably, if an external force intervened—say, a person tried to distract the robot mid-task—π0 could recover and continue successfully.
π0 has also been fine-tuned for other household-like tasks, such as bussing tables. In one example, the robot not only picked up dishes and trash but also demonstrated emergent strategies—such as shaking off trash from plates before stacking them into the bussing bin—indicating an advanced level of situational understanding that had not been explicitly programmed.
In controlled evaluations, π₀ significantly outperformed previous robot learning systems, showing particular strength in dexterous manipulation tasks that require precise control and adaptation to varying conditions.
While π₀ represents a major advance, the company acknowledges it's still in early stages. The model's capabilities are closer to GPT-1 than current state-of-the-art language models, suggesting significant room for improvement.
Physical Intelligence emphasizes that achieving truly general robot control will require further advances in areas including:
- Long-horizon reasoning and planning
- Autonomous self-improvement
- Robustness and safety
- Hardware integration and optimization
The company is actively collaborating with robotics labs and companies to refine hardware designs and expand the model's capabilities through additional training data.
Physical Intelligence's work on π₀ suggests a future where robots can be programmed through natural language commands rather than specialized code. This could dramatically simplify robot deployment across industries and applications.
The development of π₀ also provides valuable insights into the requirements for general robot intelligence, highlighting the importance of combining large-scale pre-training with specific robotics expertise.
As robots become increasingly central to manufacturing, logistics, and service industries, the ability to create general-purpose control systems like π₀ could prove transformative. The company is actively seeking collaborations with robotics labs and companies interested in contributing to data collection or refining hardware designs.